[제어 시스템] eigenvalue로 poles 구하기
제어에서 상태 공간 표현식(State Space representation)이란 물리적 계를 입력, 출력, 상태 변수의 1차 미분 방정식으로 표현하는 수학적 모델입니다.
어떤 선형 시스템의 가장 일반적인 상태 공간 표현식은 아래와 같은 형태로 적을 수 있습니다.

A의 eigenvalue는 해당 시스템의 poles가 됩니다. 어떻게 A의 eigenvalue가 시스템의 poles과 동일한지 정리해보려 합니다.
1. 전달함수 구하기

라플라스 변환하게 되면,

이 됩니다.

라플라스 변환을 하면

이 됩니다.
위에서 계산한 X(s)를 대입하면

따라서, 전달함수 G(s)는

가 됩니다.
G(s)에서 pole이 되는 부분은 빨간 박스 부분입니다.
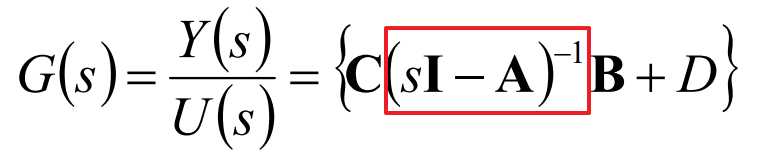
빨간 박스 부분은 A의 eigenvalue와 동일한 값입니다.
따라서, A의 eigenvalue가 전달함수 G(s)의 극점(pole)이 됩니다.
2. 고유값 구하기
고유값, 고유벡터란
n x n 정방행렬(고유값, 고유벡터는 정방행렬에 대해서만 정의) A에 대해 Av = λv를 만족하는 0이 아닌 열벡터 v를 고유벡터 (eigenvector) , 상수 λ를 고유값 (eigenvale) 이라 정의합니다. 일부 경우를 제외하면 nxn 크기의 행렬은 n개의 고유값과 고유벡터를 갖습니다.

λ는 '행렬 A의 고유값', v는 '행렬 A의 λ에 대한 고유벡터'입니다.
고윳값 계산
Av = λv
Av - λv = 0 (0: 영행렬)
(A - λE)v = 0 (E: 단위 행렬)
고유벡터는 정의에 의해서 영벡터가 아닌 벡터여야 하므로 (A-λE)의 역행렬이 존재하지 않는 경우에만 존재할 수 있습니다. 따라서, 고유벡터가 존재하기 위해서는 일단은 det(A-λE) = 0 이어야 합니다.
det(A-λE) = 0 임을 통해 고윳값 λ를 계산할 수 있습니다.
위에서 계산한 전달 함수는 다음과 같습니다.
det(A-λE)와 같은 형태입니다. (λ를 s에 대응) A의 eigenvalue가 전달함수 G(s)의 극점(pole)이 됨을 확인할 수 있습니다.
3. 예제 풀어보기

A, B, C, D 는 다음과 같이 주어졌습니다.

각 각을 대입하면 다음과 같이 유도됩니다.

이번에는 A의 eigenvalue를 구해봅니다.


det(A-λE) = -λ(-1-λ)+2= λ^2 +λ+ 2
G(s)의 극점과 동일한 -0.5 +1.3229i, -0.5 - 1.3229i를 가지는 걸 확인할 수 있습니다.
reference